Imagerie
La majorité des outils qui seront mis en œuvre dans le cadre du programme de recherche TAHMM fournissent des données rasters qu'il faut traiter et analyser. Les traitements possibles divergent en fonction des types de rasters. ¤ Image « classique » ou chaque pixel expriment une valeur de couleur (3 bandes -- Rouge, Vert, Bleue), ¤ image traduisant le relief où chaque pixel complète l'information de couleur avec l'altitude, ¤ image multispectrale qui rajoute à la valeur de couleur celle d'une 4^ème^ bande, le PIR (Proche Infra Rouge), ¤ image thermique où chaque pixel rajoute à la valeur de couleur celle de la température.
A partir de ces différents rasters, il est possible de faire différents traitements comme la photo-interprétation, le calcul d'indices de végétation, la classification non supervisée ou la détection des microreliefs..etc.
Photo-interprétation
Les images aériennes permettent de repérer des anomalies, des variations de couleur du sol (Soil marks) (Fig. 1) ou des végétaux (Crop mark) pouvant être révélatrices de la présence de structures archéologiques enfouies.
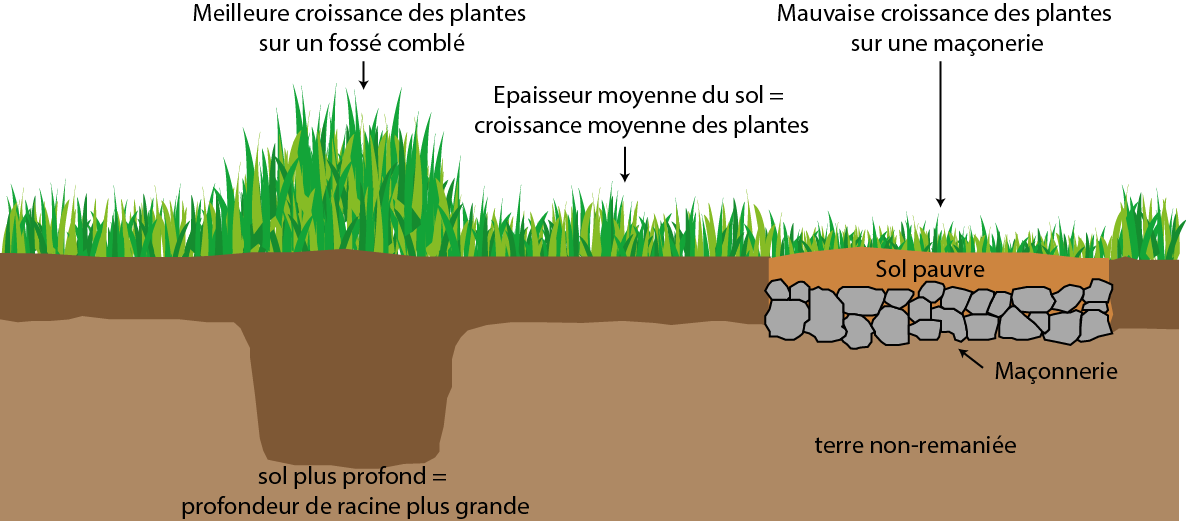
Figure 1 - Crop marks
Il est également possible de repérer des vestiges archéologiques avec des images réalisées avec une forte lumière rasante.
Les premier vecteur utilisé pour ces acquisition vont être les avions de tourisme parce-qu'ils ont une bonne autonomie ce qui leur permet de couvrir de grand territoire ou des ULM (Ultra Léger Motorisé) parce-qu'ils permettent les vols plus lents à faible altitude.
Toutefois, ces deux vecteurs ont un coût d'usage élevé (actuellement environ 150€ de l'heure) et nécessitent une mise en œuvre complexe. En effet ils demandent le recours à un pilote, nécessitent une planification des vols plusieurs semaines à l'avance ce qui réduit la maîtrise des conditions optimales d'observation, qu'elles soient météorologiques ou de lumière. Autre inconvénient, les acquisitions ne peuvent pas être faites en dessous de 150 mètres d'altitude et à moins de 140 km/h, ce qui complexifie la prise de vue (augnmentation du nombre de floue) et donne une résolution spatiale moyenne des images. L'ensemble de ces contraintes sont des facteurs limitant les possibilités de répétabilité des acquisitions et donc de travailler en multitemporel. (Poirier N. , 2018)
Dans les années 2010, l'usage des drones civils s'est démocratisé. Le déploiement de drones équipés de systèmes de sécurité (retour maison, décollage et atterrisage semi-automatique, navigation par waypoint), la minaturisation des capteurs photographiques numériques ainsi que des moyens de stockage et de transmission des données, permettent aujourd'hui de proposer une réelle rupture technologique dans la détection des vestiges archéologiques.
C'est dans cet esprit que les membres de l'équipe Terrae ont développé le programme de recherche Archéodrone (Poirier, Hautefeuille, & Calastrenc, 2013). Ce programme vise a associer la souplesse d'utilisation des drones, la possibilité qu'ils offrent de faire varier la hauteur des acquisitions de 1 à 150 mètre. L'abaissement de la hauteur de vol et le fait que la vitesse de vol des drones peut être contrôlée et limitée (généralement à 4m/s) font que les clichés réalisés ont une très bonne résolution spatiale (généralement, les pixels font quelques centimètres carré), ce qui a un impact majeur sur les capacités de détection. De plus, la possibilité d'effectuer plusieurs vols aux mêmes endroits à différentes périodes de la journée et/ou de l'année, cumulé à la régularité des vols programmés permet de réaliser des analyses multitemportelles. (Poirier, Hautefeuille, & Calastrenc, 2017)
L'abaissement de la hauteur d'acquisition des images aériennes a-t-il quel impact sur les capacités de détection des vestiges archéologiques ? Avec la mise à disposition par l'IGN d'orthophotographie ayant une résolution spatiale de 20 cm, une photo-interprétation ne peut-elle pas, à elle seule, s'avérer suffisante ? Les limites de la photo-interprétation sont connues et sont marquées par des temps de traitement long et une hétérogénéité de l'interprétation en fonction des images et des opérateurs. (Sparfel, Gourmelon, & Le Berre, 2008)
La photo-interprétation permet donc la localisation de zones ayant un potentiel archéologique. Elle peut être un outil pour la réalisation d'une première évaluation. Toutefois, elle demande d'être couplée à d'autres types de traitements d'image et à des analyses spatiales.
Imagerie multispectrale
Lorsque l'on cherche à adapter les méthodes de la détection archéologique pour pouvoir aborder de plus grand territoire, la question de l'usage d'imagerie satellitaire se pose.
Des travaux de détection automatique ou semi-automatique de sites archéologiques de haute et moyenne montagne par traitement d'images satellite ont déjà été réalisés.
Toutefois,
-
La résolution radiométrique des images satellite n'est actuellement pas suffisante pour une identification de "qualité" des sites archéologiques. En effet, les images satellites gratuites ont une taille de pixel d'au mieux, de 1.5 m, Pour ces images, la grille de pixel la plus fine proviennent des images Spot 6/7. Quant aux images satellites payantes, avec des pixels de respectivement de 0.3 m et de 0.5 m, les meilleures résolutions spatiales sont issues des images Worldview 4 et Pléiade THRS. Il faut cependant signaler que ce problème de résolution spatiale peut être modéré par une approche multisource (De Laet & Lambers, 2009, p. 12).
-
La complexité et l'extrême variété des formes à détecter est le second écueil (Rendu, Calastrenc, Le Couédic, & Berdoy, 2016, p. 69 et 70, Le Couédic, 2010, p. 511-515). Comment repérer l'ensemble ou du moins la très grande majorité des structures archéologiques d'un pâturage lorsque les plans, les superficies et les états de conservation divergent ? Comment repérer les constructions totalement arasées, généralement les plus anciennes, entièrement recouvertes par de la végétation et visibles que par des micros-reliefs d'une dizaine de centimètre de hauteur ou par un alignement de quelques pierres éparses ?
Travailler avec des images satellite a deux atouts :
-
Elles permettent de travailler sur plusieurs bandes spectrales. Il est ainsi possible de faire des calculs d'indice de végétation
-
Elles permettent de réaliser des classifications non supervisées et/ou supervisées d'objet.
Il est maintenant possible de faire ces analyses (calcul d'indice de végétation, classification supervisée et non-supervisée) à partir d'image multispectrales prises par drone. L'abaissement de la hauteur d'acquisition des données permet d'obtenir une meilleure résolution spatiale (Poirier, Hautefeuille, & Calastrenc, 2013) et donc une classification plus fine. Par exemple, avec un drone à voilure fixe, le DT18 de Delair Tech' (Fig. 5), l'image multispectrale (R, V, B, PIR et Red Edge) en sortie, prise à environ 100 m de hauteur, aura un pixel de 7,5 cm contre 50 cm pour une image satellite Pléiade. Théoriquement, avec les images de ce drone, il serait possible de détecter des objets d'une quinzaine de centimètres contre 1 m pour les images Pléiade. Reste que l'utilisation de ce drone en haute montagne est compliquée. Les reliefs forts empêchent très souvent son utilisation car les taux d'incidence nécessaires pour passer les reliefs sont supérieurs à ceux supportées par ce drone. Son utilisation ne peut pas être généralisée. Toutefois, un capteur multispectral, voire même hyperspectral, implémenté sur un drone à voilure tournante permettrait de résoudre ce problème.
Indices de végétation
Les capteurs satellite multispectraux enregistrent le rayonnement solaire réfléchi par « la Terre ».
Les images acquises par des satellites multispectraux permettent donc de distinguer des « signatures spectrales » différentes en fonction des surfaces. Par exemple, la végétation réfléchit plus dans les plages spectrales allant de 0,7 à 0,9 micromètre alors qu'un sol nu se caractérisera par une signature spectrale allant de 0,6 à 0,7 micromètre.
La résolution spectrale des images satellites varie en fonction des satellites. Ainsi, les images satellites gratuites, de type Spot 6/7, est souvent réduite à 4 bandes spectrales (le rouge -R-, le vert -V-, le bleu -B-et le Proche-Infra rouge -PIR-). Quant aux satellites fournissant un service payant, tels que WorldView et Pléiade, ils fournissent également des images 4 bandes (Rouge, vert, bleu, Proche infra-Rouge) mais avec des plages spectrales légèrement différentes.
| Pléiade | Worldview |
|---|---|
| Bleu - 450 et 510 nm | Bleu - 420 et 500 nm |
| Vert - 510 et 580 nm | Vert - 520 et 600 nm |
| Rouge - 655 et 690 nm | Rouge - 610 et 690 nm |
| PIR - 780 et 920 nm | PIR - 760 et 890 nm |
Chaque satellite définit donc les bornes des bandes spectrales qu'il perçoit. Tous les satellites ne voient donc pas de la même manière une même surface.
Pour effectuer des calculs d'indice de végétation, qui permettent d'identifier des végétaux, de connaître leur densité et/ou leur état de santé, seront utilisées les longueurs d'onde et l'intensité de la réponse spectrale. Ce que l'on va essayer de détecter, c'est l'impact des structures archéologiques enfouies sur la croissance ou la couleur de la végétation (Fig. 2)
Les indices de suivi de la végétation les plus couramment utilisés sont l'Indice de Végétation par Différence Normalisée (NDVI), l'Indice de Végétation Amélioré (EVI) ou l'indice Soil Adjusted Vegetation Index (SAVI), ils permettent de calculer la densité de la végétation ou de travailler avec le stress hydrique (MSI). (Lasaponara & Masini, 2006, Agapiou, Hadjimisis, & Alexakis, 2012) Sont également utilisé l'amélioration des histogrammes et les Analyse en Composante Principale (ACP).
Ces dernières années, des chercheurs travaillent sur l'amélioration des traitements des images multispectrales pour de la détection archéologiques par l'utilisation d'équation linéaires. Ces équations linéaires, qui ont été développées pour plusieurs capteurs satellites à moyenne et haute résolution (essentiellement QuickBird et GeoEye, tous deux disposant d'une très haute résolution spatiale avec un pixel de 46 cm). Elles permettent d'obtenir un nouvel espace spectral 3D où les 3 composantes sont : Croissance végétale, les cultures, le sol. (Agapiou, Lysandrou, Lasaponara, Masini, & Hadjimitsis, 2016 ;
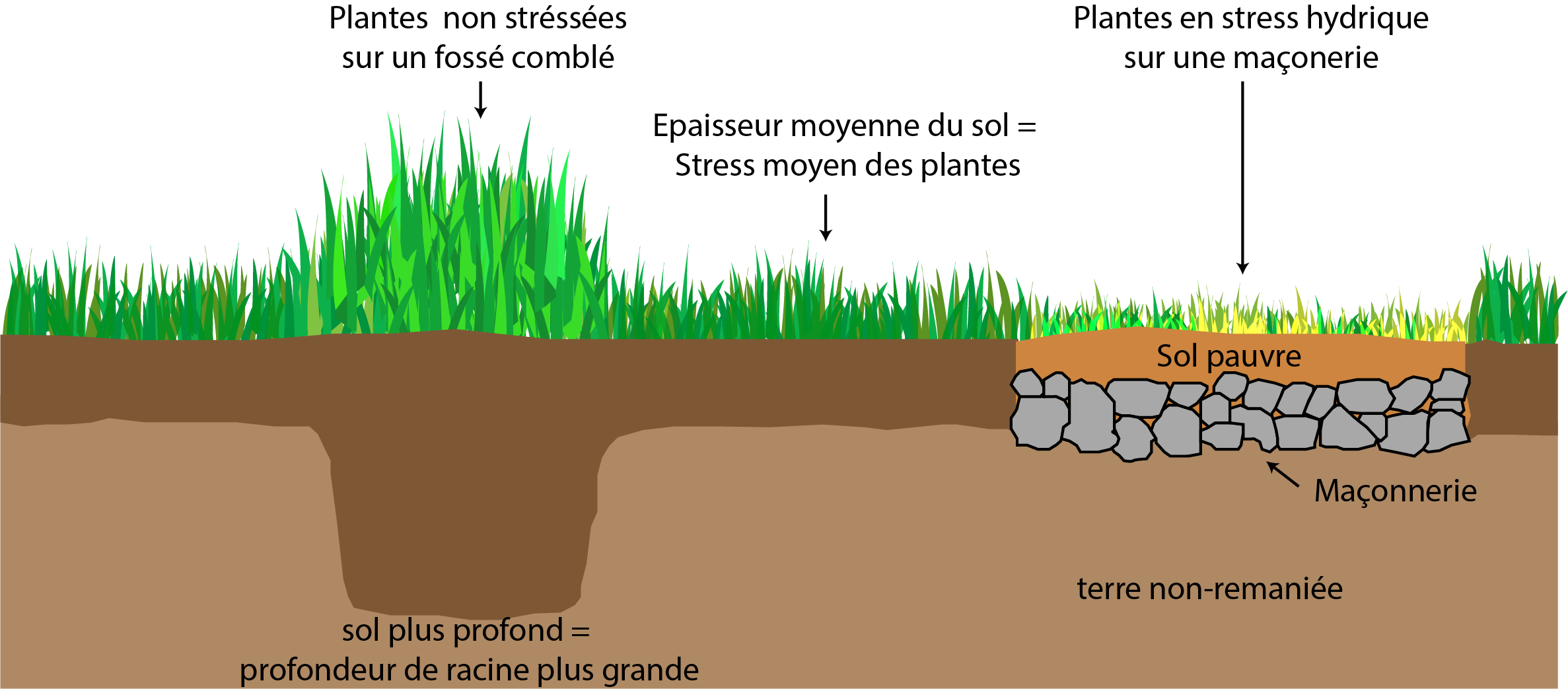
Figure 2 - Principe du stress hydrique des plantes
Classification d'image
Le traitement des images multispectrales peut également être un peu plus poussée en réalisant des classifications non supervisée ou orientée objet. (Ducrot, 2005)
Classification non supervisée.
Lors d'une classification non supervisée ou semi supervisée, les objets recherchés ne sont pas déterminés par l'opérateur mais par des algorithmes.
Pour classifier l'image, ces algorithmes utilisent la valeur spectrale des pixels.
L'opérateur détermine le nombre de classe qu'il souhaite obtenir et peut également définir des paramètres de distance entre les classes. Une fois que l'algorithme à effectuer la classification, l'opérateur affecte un nom à chaque classe et/ou peut combiner plusieurs classes. (Fig. 3)
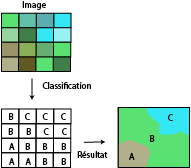
Figure 3 - Principe de la classification non supervisée
Classification Orientée Objet
Contrairement à la classification non supervisée ou semi-supervisée, la Classification Orientée Objet (COO) ne traite pas les pixels individuellement, mais se base sur des groupes (des objets) définit par l'opérateur.
Cette démarche demande d'avoir une connaissance très fine des objets recherchés car en premier lieu, il faut les définir (ici, les structures archéologiques) et donc disposer de référentiels. Il est donc nécessaire d'établir une nomenclature des objets recherchés et d'identifier les variables qui les définissent. C'est l'étape de définition des classes, étape qui est réalisée par l'utilisateur et correspond aux objets qu'il recherche.
La seconde étape consiste à découper l'espace, à segmenter l'image, en sections, en groupe de pixels, de même apparence. Ce regroupement portera non seulement sur les valeurs spectrales des pixels mais aussi sur la taille, la forme et son voisinage Durant cette étape, les pixels sont progressivement regroupés à leurs voisins pour créer des objets de plus en plus grands tout en respectant un seuil d'hétérogénéité (Sparfel, Gourmelon, & Le Berre, 2008). Le seuil d'hétérogénéité des objets est calculé en prenant en compte la couleur des pixels, ce qui renvoi à la valeur spectrale, et à la forme de l'objet ce qui correspond à sa texture. Il s'agit de déterminer les classes, une nomenclature de classification et de fournir des échantillons permettant l'initialisation et la validation de la classification. Il faut donc prendre en compte la taille des objets que l'on souhaite identifier. Si elle est supérieure à la taille des pixels de l'image, les contraintes de détermination des pixels servant à la classification sont faibles. Si l'objet est inférieur à la taille des pixels de l'image, les contraintes de sélection des pixels servant à la classification vont être fort.
S'en suit une validation de l'apprentissage qui peut être inter-classe ou intraclasse. (Fig. 4)
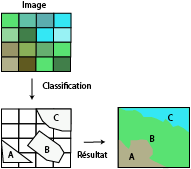
Figure 4 - Principe de le classification supervisée
L'avantage de la classification supervisée est qu'elle prend appui sur la connaissance des chercheurs, mais ne peut servir dans le cadre d'une première approche d'un secteur. Elle ne peut être généralisée à l'ensemble d'un massif par exemple.
Thermographie aéroportée par drone
La thermographie par avion est utilisée depuis les années 1970 en archéologie (Tabbagh, 1977, Lundén, 1985 , Bellerby, 1990). Cette technique coûteuse et compliquée à mettre en œuvre a été abandonnée par les archéologues. Toutefois, un regain d'intérêt s'observe depuis quelques années. La minaturisation récente des capteurs infrarouges thermiques et l'amélioration de leur résolution spatiale et spectrale permet détecter des anomalies thermiques fines (Cailloce, 2015) C'est en 2011 que l'équipe Terrae a commencer les premiers tests de télédétection archéologique par thermographie par drone. (Poirier N. H., 2013)
La prospection thermique aéroportée repose sur le principe selon lequel il existe une différence thermique de la surface du sol ou de la végétation sur les zones renfermant des structures archéologiques enfouies par rapport aux milieux (Eppelbaum, 2009). Les structures archéologiques enfouies auront tendance à réagir différemment aux changements de température par rapport aux sédiments encaissants, se réchauffant ou se refroidissant plus ou moins rapidement selon leur nature. Par exemple, les structures construites en pierre auront une inertie thermique plus grande que les sédiments qui l'entourent. Ce que l'on va donc pouvoir observer en thermographie par drone, c'est une plus grande inertie thermique (Fig. 5) à l'emplacement des structures archéologiques. Ainsi, dans un champ de céréales, les racines des plantes viennent en contact avec les vestiges archéologiques comme des murs. Les plantes situées sur ces vestiges vont avoir moins d'eau et moins de nutriments que les autres. Elles vont donc être stressées et vont avoir tendance à chauffer plus que les autres. (Poirier, 2012 ; Poirier, Prospection aérothermique, 2016)
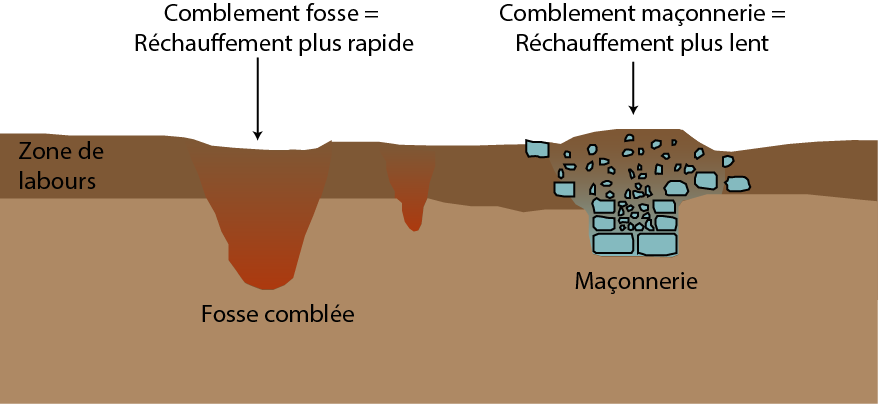
Figure 5 - Principe de la thermographie en archéologie
Coupler cette technologie avec un drone permet de pallier les contraintes fortes des acquisitions par avion ou hélicoptère. C'est ce qui a été développé dans le cadre du programme Archéodrone. Le premier type de capteur implémenté sur un drone a été un appareil photographique numérique pour des travaux de photogrammétrie (Cf chapitre Photogrammétrie) et une caméra thermique pour de la détection par thermographie. Pour la thermographie, les choix s'est portés sur un drone octorotor équipé d'une caméra thermique FLIR T620 posée sur une navelle munie d'un axe de rotation horizontal. Cette caméra permet d'obtenir des clichés thermiques situés dans la gamme d'infrarouge thermique allant de 7,5 à 14 µm avec une sensibilité de 0,04°. La résolution des images est relativement faible (480 x 640 pixels) mais cela peut être en partie compensé par l'abaissement de l'altitude de vol. Ces clichés peuvent être travaillés et traités dans un logiciel FLIR dédié « Flir Tools ». (Poirier, Hautefeuille, & Calastrenc, 2013)