Imagen digitales
La mayoría de las herramientas que se aplicarán como parte del programa de investigación TAHMM proporciona los datos rasterizados. Los posibles tratamientos difieren según el tipos de ráster. ¤ Imagen "clásica" en la que cada píxel expresa el valor del color (3 bandas -- Rojo, Verde, Azul), ¤ imagen que traduce el relieve donde cada píxel completa la información de color con la altitud, ¤ imagen multiespectral que suma al valor del color la de una 4ª^ banda, la PIR (Near Infra Red - entre 0,7μm à 1,6μm). ¤ imagen térmica donde cada píxel añade al valor del color el valor de la temperatura.
A partir de estos diferentes rastreos, es posible realizar diferentes tratamientos como la fotointerpretación : cálculo de los índices de vegetación, clasificación no supervisada o detección de microrrelieves, etc.
Fotointerpretación
Las imágenes aéreas pueden utilizarse para identificar variaciones de color del suelo (marcas de suelo) (Fig. 1) o color de la planta (marcas de cultivo) (Fig. 1) que pueden indicar la presencia de estructuras arqueológicas enterrado.
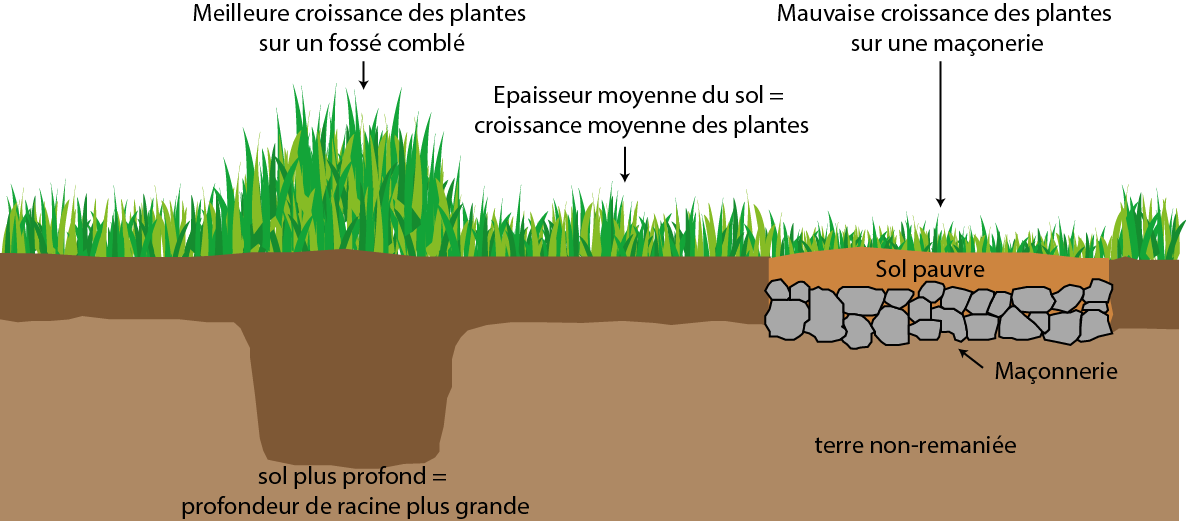
Figura 1 - Marcas de cultivo
También es posible localizar restos arqueológicos con imágenes realizadas con una luz rasante.
El primer vector utilizado para este tipo de adquisiciones será el avión de turismo porque tienen una buena autonomía y que permite cubrir grandes territorios o ULM (Ultra Light Motorized) porque permiten vuelos más lentos a menor altura.
Sin embargo, estos dos vectores tienen un alto coste de uso (actualmente unos 150 euros por hora) y requieren una iaplicación compleja. Requieren el uso de un piloto, requieren una planificación de los vuelos con varias semanas de antelación, lo que reduce la control de las condiciones óptimas de observación, ya sean el tiempo o la luz. Otra desventaja es que las adquisiciones no puede hacerse por debajo de los 150 metros de altitud y a menos de 140 km/h, lo que hace que el rodaje sea más complejo (aumento del número de de desenfoque) y da una resolución espacial media de las imágenes. Todos estos condicionantes son factores que limitan la repetibilidad de las adquisiciones y, por tanto, la posibilidad de trabajar en multitemporal. (Poirier N. , 2018)
En la década de 2010, el uso de drones civiles se ha democratizado. El despliegue de drones equipados con sistemas de seguridad (regreso a casa, despegue y aterrizaje semiautomático, navegación por puntos de referencia), el minaturización de los sensores permiten hoy de proponer un verdadero avance tecnológico en la detección de restos arqueológicos.
Con este espíritu, los miembros del equipo de Terrae han desarrollado el programa de investigación Archéodrone (Poirier, Hautefeuille, & Calastrenc, 2013). Este programa pretende combinar la flexibilidad del uso de vehículos aéreos no tripulados, la posibilidad que ofrecen de variar la altura de las adquisiciones de 1 a 150 metros. El descenso de la altura de vuelo y la velocidad de vuelo de los drones puede ser controlada y limitada (generalmente a 4m/s) significa que los disparos producidos tienen una muy buena resolución espacial (generalmente, los píxeles hacen unos pocos centímetros cuadrados), lo que tiene un gran impacto en la capacidad de detección. Además, la capacidad de realizar varios vuelos en el mismos lugares en diferentes momentos del día y/o del año, combinada con la regularidad de los vuelos programados permite realizar análisis multitemporal. (Poirier, Hautefeuille y Calastrenc, 2017)
¿Bajar la altura de adquisición de las imágenes aéreas, tiene un impacto en la capacidad de detección de los restos arqueológicos? Con las ortofotografías de l'IGN de una resolución espacial de 20 cm, una fotointerpretación no puede ser suficiente? Los límites de la fotointerpretación son conocidos : tiempos de tratamientos de las imagenes y una heterogeneidad de interpretación según el imágenes y los operadores. (Sparfel, Gourmelon y Le Berre, 2008)
La fotointerpretación permite así la localización de zonas con un potencial arqueológico. Puede ser una herramienta para la realización de una evaluación inicial. Sin embargo, debe ir acompañada de otros tipos de procesamiento de imágenes y análisis espacial.
Imágenes multiespectrales
Cuando se trata de adaptar los métodos de detección arqueología para poder abordar un territorio más amplio, la cuestión de la de la utilización de imágenes por satélite se hace.
Trabajar a mejorar de detección automática o semiautomática de los yacimientos arqueológicos de alta y media montaña mediante puede necesitar el tratamiento de imágenes satélite.
Sin embargo,
-
Actualmente, la resolución espaciales de las imágenes de satélite no es suficiente para una identificación "de calidad" de los lugares arqueológico. De hecho, las imágenes de satélite gratuitas y accesibles para el mundo civil tienen un tamaño de píxel, a el mejor de los casos, de 1,5 m. Para estas imágenes, la cuadrícula de píxeles son de imágenes Spot 6/7. Es un poco mejor por las imágenes de satélite pagadas, que tienen píxeles de 0,3 m y 0,5 m. Las mejores resoluciones espaciales son a partir de imágenes de Worldview 4 y de Pleiades THRS. Sin embargo, señalan que este problema de resolución espacial puede ser moderado por un enfoque de múltiples fuentes (De Laet & Lambers, 2009, p. 12).
-
La complejidad y extrema variedad de las formas a detectar es la segundo escollo (Rendu, Calastrenc, Le Couédic, & Berdoy, 2016, p. 69 y 70, Le Couédic, 2010, pp. 511-515). Cómo detectar todas, o al menos la gran mayoría, de las estructuras de un pastizal cuando los planos, las superficies y los estados de conservación divergen? Cómo detectar construcciones totalmente aplanadas, generalmente las más antiguas, enteramente cubierto por la vegetación y visible sólo por microrrelieves de unos diez centímetros de altura o por una alineación de algunas piedras dispersas?
Pero, trabajar con imágenes de satélite tiene dos ventajas:
-
Permiten trabajar en varias bandas espectrales con quien es posible de realizar cálculos de índices de vegetación.
-
Permiten realizar clasificaciones supervisadas, no supervisadas y/o objeto supervisado.
Ahora es posible realizar estos análisis (cálculo de la vegetación, clasificación supervisada y no supervisada) de imágenes multiespectrales tomadas con un drone. El descenso de la altura permite una mejor resolución de los datos (Poirier, Hautefeuille, & Calastrenc, 2013) y, por tanto, una clasificación más fina. Por ejemplo, con un drone de ala fija, el DT18 de Delair Tech' (Fig. 5), la salida de la imagen multiespectral (R, G, B, PIR y Red Edge), tomada en de unos 100 m de altura, tendrá un píxel de 7,5 cm ... en frente a los 50 cm de un Imagen de satélite de las Pléiades. En teoría, con las imágenes de este drone, sería capaz de detectar objetos de hasta 15 centímetros... frente a 1 m para las imágenes de las Pleiades. El hecho es que el uso de este drone en la alta montaña es complicado. El relieve hace que sea muy difícil de usarlo porque la incidencia necesaria para pasar en cima del montè es mayor que el soportado por este drone. Sin embargo, un sensor multiespectral, o incluso hiperespectral, implementado en un UAV solucionaría este problema.
Índices de vegetación
Los sensores multiespectrales de los satélites registran la radiación energía solar reflejada por "la Tierra".
Las imágenes adquiridas por los satélites multiespectrales permiten por tanto distinguir entre diferentes "firmas espectrales" basadas en la superficies. Por ejemplo, la vegetación es más reflectante en las playas espectral de 0,7 a 0,9 micrómetros, mientras que el suelo desnudo se caracterizará por una firma espectral que va de 0,6 a 0,7 micrométrico.
La resolución espectral de las imágenes de satélite varía según el satélites. Por ejemplo, las imágenes gratuitas del satélite Spot 6/7, suele reducirse a 4 bandas espectrales (rojo -R-, verde -V-, azul -B- y el infrarrojo cercano -PIR-). En cuanto a los satélites como WorldView y Pléiade, prestan un servicio de pago, se también proporcionan imágenes de 4 bandas (rojo, verde, azul, casi infrarrojo) pero con rangos espectrales ligeramente diferentes.
| Pléiade | worldView4 |
|---|---|
| Azul - 450 y 510 nm | Azul - 420 y 500 nm |
| Verde - 510 y 580 nm | Verde - 520 y 600 nm |
| Rojo - 655 y 690 nm | Rojo - 610 y 690 nm |
| PIR - 780 y 920 nm | PIR - 760 y 890 nm |
Por lo tanto, cada satélite define los límites de las bandas espectrales que utilizará para percibe. Por lo tanto, no todos los satélites tienen la misma visión de un misma superficie.
Para realizar los cálculos del índice de vegetación, que permiten identificar las plantas, conocer su densidad y/o su estado de salud, se utilizarán las longitudes de onda y la intensidad de la respuesta espectral. Lo que vamos a intentar detectar es el impacto de las estructuras arqueológicas enterradas sobre el crecimiento o el color de la vegetación (Fig. 2)
Los índices de vigilancia de la vegetación más utilizados son el Índice de Vegetación de Diferencia Normalizada (NDVI), el Índice de Vegetación de Diferencia Normalizada Vegetación mejorada (EVI) o el Índice de vegetación ajustado al suelo. (SAVI), se utilizan para calcular la densidad de la vegetación o trabajar con el estrés hídrico (MSI). (Lasaponara y Masini, 2006, Agapiou, Hadjimisis, & Alexakis, 2012) También se utilizan mejora del histograma y análisis de componentes principales (PCA).
En los últimos años, los investigadores han trabajado en la mejora el procesamiento de tratamientos de las imágenes multiespectrales para la detección arqueológico mediante el uso de ecuaciones lineales. Estas ecuaciones que se han desarrollado para una serie de sensores de satélite en media y alta resolución (principalmente QuickBird y GeoEye, todos dos con una resolución espacial muy alta con un píxel de 46 cm). Permiten obtener un nuevo espacio espectral 3D en el que los componentes son el crecimiento de las plantas, de los cultivos y del suelo. (Agapiou, Lysandrou, Lasaponara, Masini y Hadjimitsis, 2016;
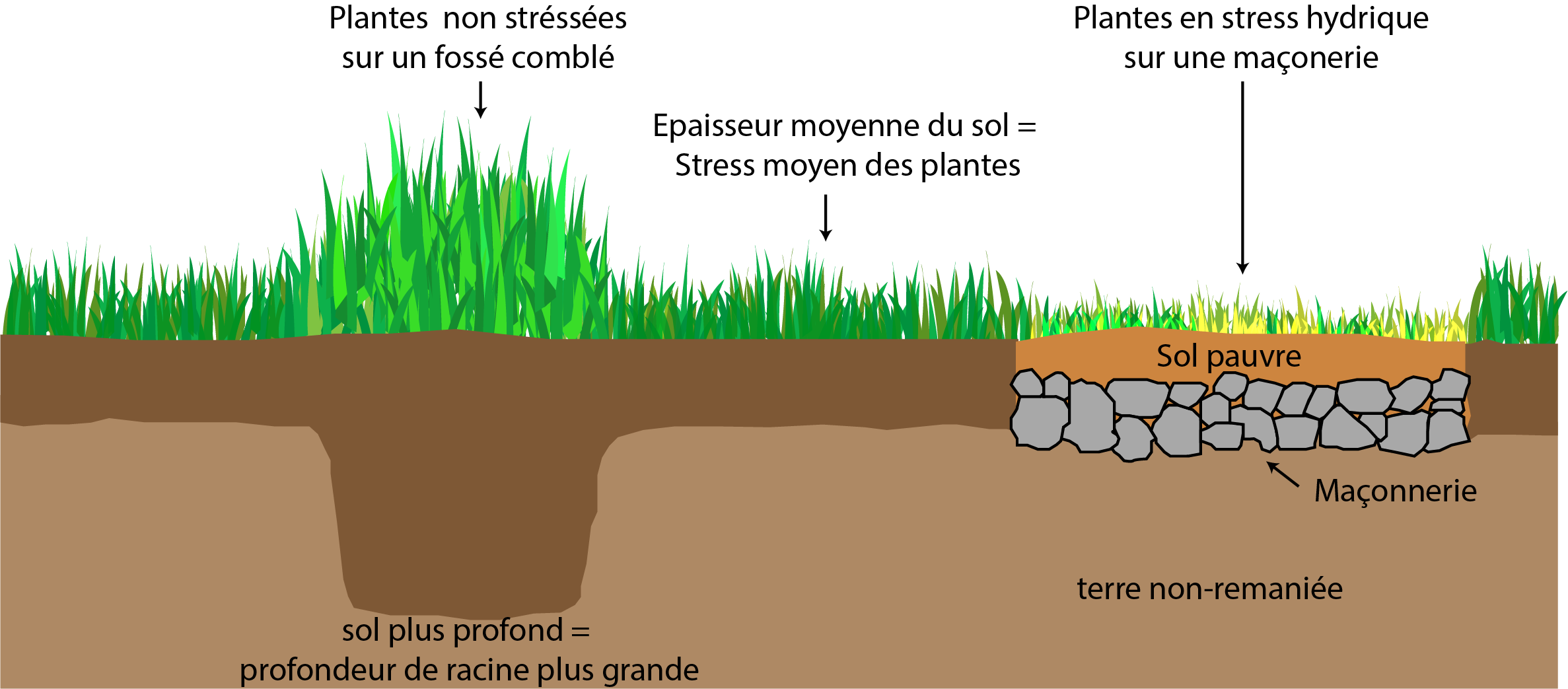
Figura 2 - Principio del estrés hídrico de las plantas
Clasificación de la imagen
Con las imágenes multiespectrales puede realizarsè clasificaciones no supervisadas o guiadas. objeto. (Ducrot, 2005)
Clasificación no supervisada.
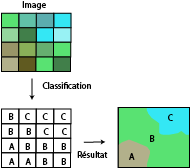
En una clasificación no supervisada o semi-supervisada, los objetos no están determinados por el operador, sino por el algoritmos.
Para clasificar la imagen, estos algoritmos utilizan el valor espectral de los píxeles.
El operador determina el número de clases que desea obtener y puede también definen los parámetros de distancia entre las clases. Una vez que esta hecha, el operador puede asignar un nombre a cada clase y/o puede combinar varias clases. (Fig. 3)
Clasificación orientada a la finalidad
A diferencia de la clasificación no supervisada o semisupervisada, la clasificación Orientada a Objetos (COO) no procesa píxeles individualmente, sino que se basa en grupos (objetos) definidos por el operador.
Este enfoque requiere un conocimiento muy detallado de los objetos que se van a manejar porque en primer lugar hay que definirlas (en este caso, las estructuras del yacimientos arqueológicos) y, por tanto, disponen de sistemas de referencia. Por lo tanto, es necesario establecer una nomenclatura de los objetos buscados e identificar el variables que las definen. Este es el paso de definición de la clase, paso que realiza el usuario y que corresponde a los objetos buscados.
El segundo paso es recortar el espacio, segmentar la imagen, en secciones, en grupos de píxeles, de la misma apariencia. Esta agrupación cubrirá no sólo los valores espectrales de los píxeles sino también sobre el tamaño, la forma y su vecindad. Durante este paso, los píxeles se agrupan gradualmente con sus vecinos para crear respetando un umbral de heterogeneidad. (Sparfel, Gourmelon y Le Berre, 2008). El umbral de heterogeneidad de objetos se calcula teniendo en cuenta el color de los píxeles, que se refiere al valor espectral, y a la forma del objeto, que corresponde a su textura. Se trata de determinar las clases, una nomenclatura de clasificación y proporcionar muestras que permitan inicialización y validación de la clasificación. Por lo tanto, es necesario tenga en cuenta el tamaño de los objetos que desea identificar. Si es mayor que el tamaño de los píxeles de la imagen, las restricciones de la determinación de los píxeles para la clasificación es débil. Si el objeto es más pequeño que el tamaño de los píxeles de la imagen, las restricciones de la selección de píxeles para la clasificación será fuerte.
A continuación, se realiza una validación del proceso de aprendizaje que puede ser interclase o intraclase. (Fig. 4)
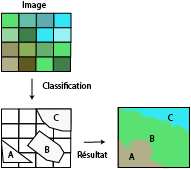
Figura 4 - Principio de clasificación supervisada
La ventaja de la clasificación supervisada es que se basa en conocimiento de los investigadores, pero no puede utilizarse como parte de un primera aproximación a un sector.
Termografía aérea con drones
La termografía aeronáutica se utiliza desde los años 70 en arqueología (Tabbagh, 1977, Lundén, 1985, Bellerby, 1990). Este técnica costosa y complicada de aplicar fue abandonada por arqueólogos. Sin embargo, ha habido un resurgimiento del interés en este campo desde algunos años. La reciente miniaturización de los sensores infrarrojos y la mejora de su resolución espacial y espectral permite la detección de finas anomalías térmicas (Cailloce, 2015) Es en 2011 que el equipo de Terrae ha comenzado las primeras pruebas de teledetección termografía arqueológica con drones. (Poirier N. H., 2013)
La prospección térmica aérea se basa en el principio de que hay una diferencia térmica de la superficie del suelo o la vegetación en las zonas que contienen estructuras arqueológicas enterrado en relación con el medio ambiente (Eppelbaum, 2009). Estructuras tenderán a reaccionar de forma diferente ante los yacimientos arqueológicos enterrados cambios de temperatura en relación con los sedimentos circundantes, se convierte calentamiento o enfriamiento más o menos rápido en función de su naturaleza. Por ejemplo, las estructuras construidas en piedra tendrán un mayor inercia térmica que el sedimento circundante. Qué por lo que vamos a poder observar en la termografía con un dron, es una ventaja. alta inercia térmica (Fig. 5) en la ubicación de las estructuras arqueológico. Por ejemplo, las estructuras construidas en piedra tendrán un mayor inercia térmica que el sedimento circundante. Qué por lo que vamos a poder observar en la termografía con un dron, es una ventaja alta inercia térmica (Fig. 5) en la ubicación de las estructuras arqueológico. Por ejemplo, en un campo de cereales, las raíces que entran en contacto con los restos arqueológicos tendrán menos agua y menos nutrientes que los demás. Así que van a estar estresados y tenderán a calentarse más que otros. (Poirier, 2012; Poirier, Prospección Aerotérmica, 2016)
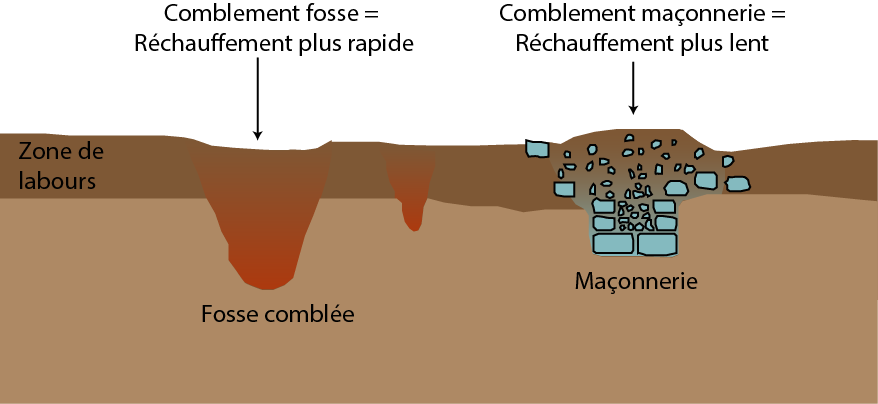
Figura 5 - Principio de la termografía en arqueología
El acoplamiento de esta tecnología con un dron permite superar la las fuertes limitaciones de las adquisiciones por avión o helicóptero. Es esto que se desarrolló como parte del programa Archéodrone. La primera tipo de sensor implementado en un UAV era una cámara digitale para trabajos fotogramétricos (véase el capítulo fotogrametría) y una cámara térmica para la detección por la termografía. En el caso de la termografía, las elecciones se hicieron en un octorotor UAV equipado con una cámara de imagen térmica FLIR T620 en un lanzadera con un eje de rotación horizontal. Esta cámara permite para obtener imágenes térmicas en la gama de infrarrojos Rango térmico de 7,5 a 14 µm con una sensibilidad de 0,04°. El resolución de las imágenes es relativamente baja (480 x 640 píxeles), pero esto se puede compensar en parte bajando la altitud de robo. Estas imágenes se pueden trabajar y procesar en un programa informático FLIR dedicó "Flir Tools".(Poirier, Hautefeuille y Calastrenc, 2013)